🎓 VIT Chennai — Mechatronics
🔧 Reverse Engineer
⚡ 50% cost cut · Kelvin6k, Chennai
About Me
Engineer.
Builder.
Innovator.
I'm Namit Jain, an electromechanical engineer graduated from Vellore Institute of Technology with a B.Tech in Mechatronics and Automation. With 2+ years of hands-on experience in defense and aerospace, I've worked on servo systems, BLDC motors, surveillance drones, and battery management systems.
My work spans from designing axial flux motors that achieved 85% efficiency to developing military-grade drones for the Indian Army, and freelancing on robotic gantry systems for construction tech startups. I take engineering problems from first concept all the way to production-ready hardware.
I also volunteer for NGOs, establishing robotics labs in rural areas — because the best engineering builds people up, not just products.
Software Stack
KiCADAltiumSolidworksFusion360Ansys MaxwellAnsys IcepakLTspiceMATLABADSESP-IDFArduino IDE
Education
B.Tech — Mechatronics & Automation Engineering
Vellore Institute of Technology (VIT)
2021 — 2025
Specialized in electromechanical systems, PCB design, control systems, and robotics. Participated in IFERP with Project EVE — a soft medical robot inspired by Harvard research.
Work Experience
Mechatronics Engineer Intern
Endureair Systems Pvt Ltd
Jul 2025 – Dec 2025 · Greater Noida, UP
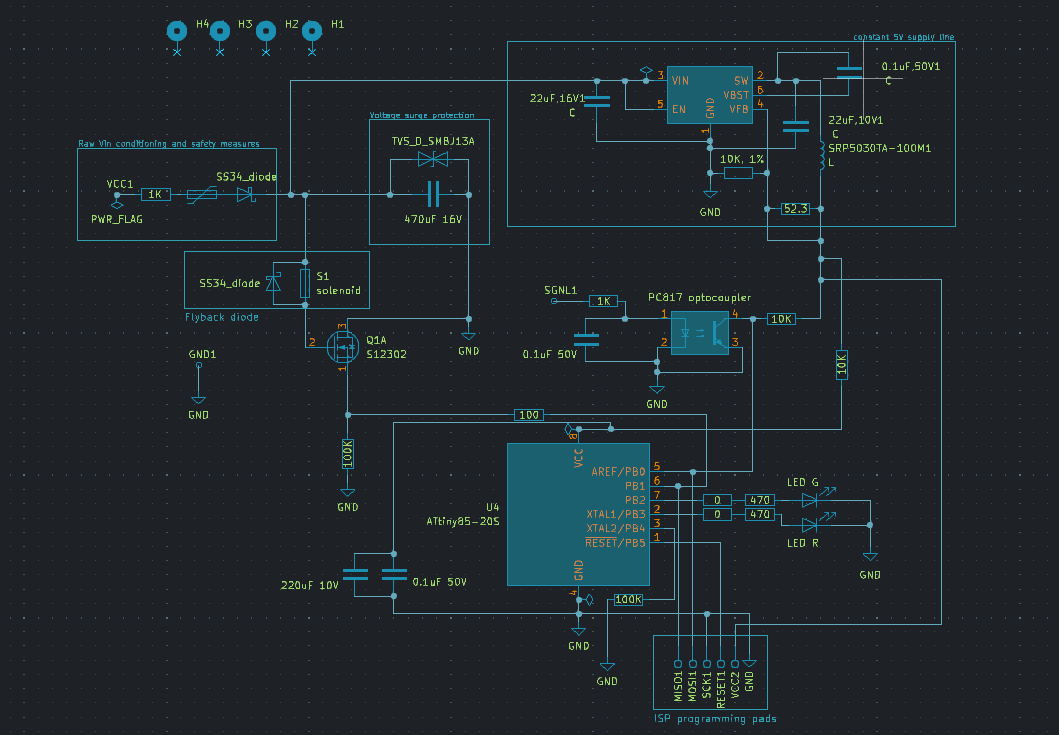
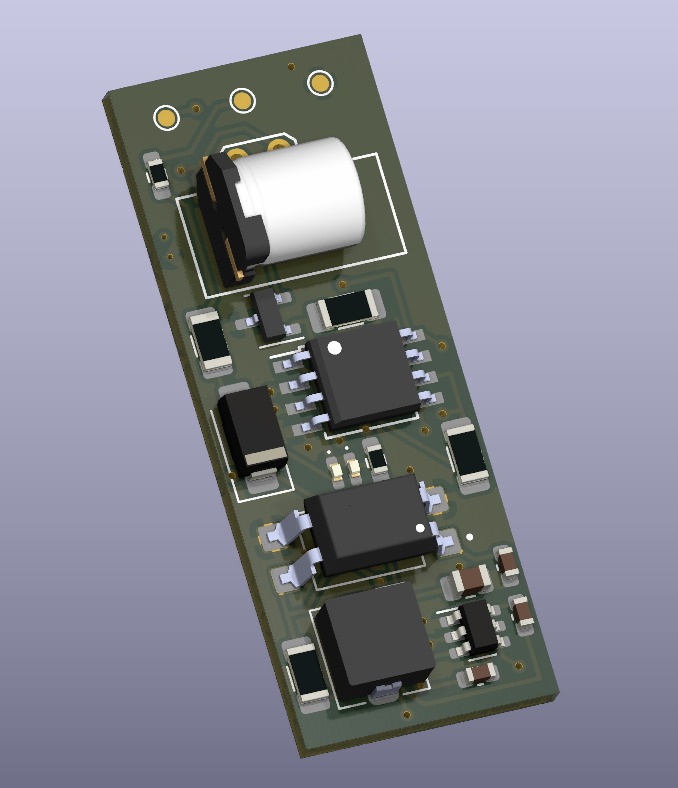
Developed surveillance and heavy payload drones for the Indian Army. Reverse-engineered Tarot thrower servo — 90% cost reduction, 22% higher power density (0.8 Nm/Kg), IP67/68, 50,000+ test cycles.
Research Engineer Intern
Airbuddy Aerospace Pvt Ltd
Sep 2023 – Feb 2024 · Greater Noida, UP
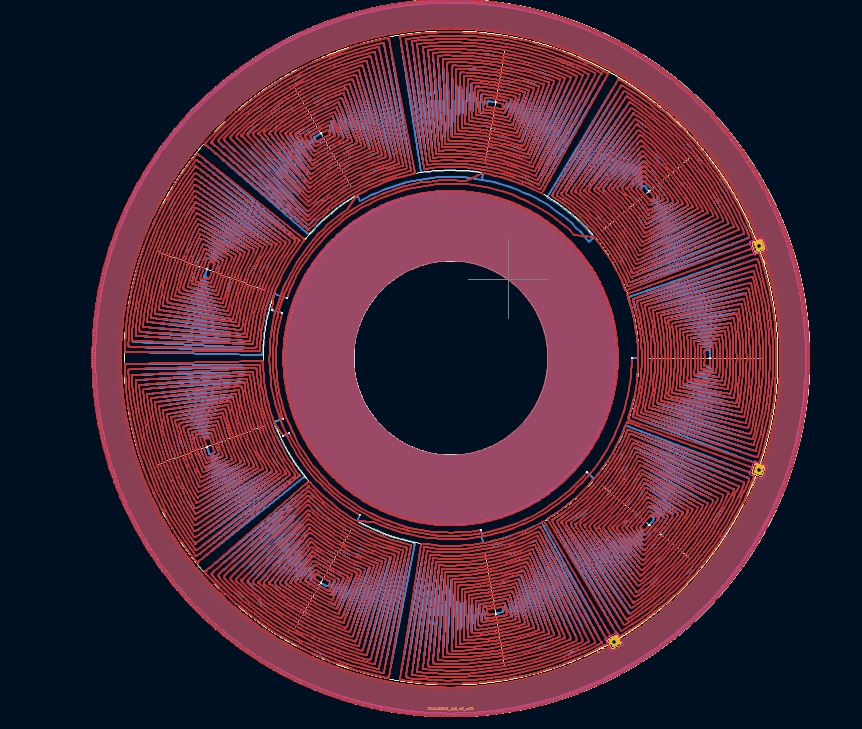
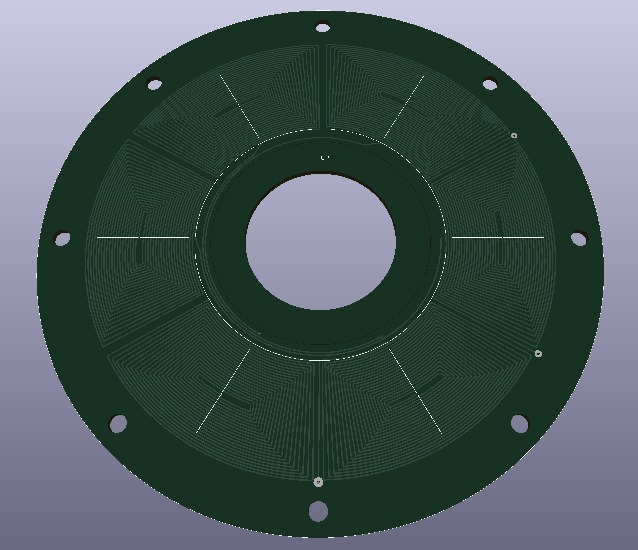
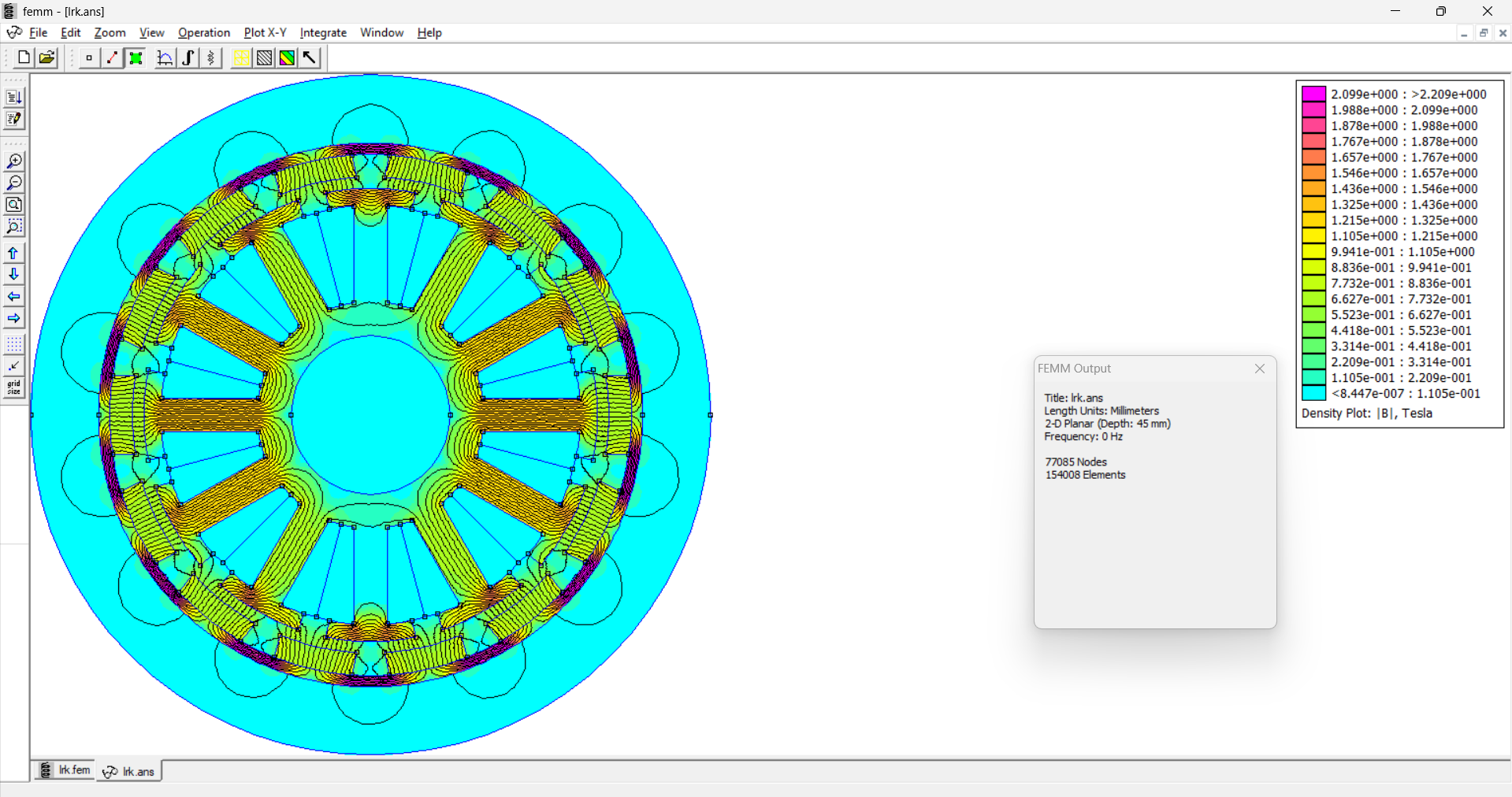
Designed 4-layer axial flux BLDC PCB stator: 1.2 kW, 85% efficiency, 3000 RPM. Fabricated 50 units. Secured ₹5 Lacs funding at iCreate Ahmedabad Incubation Programme.
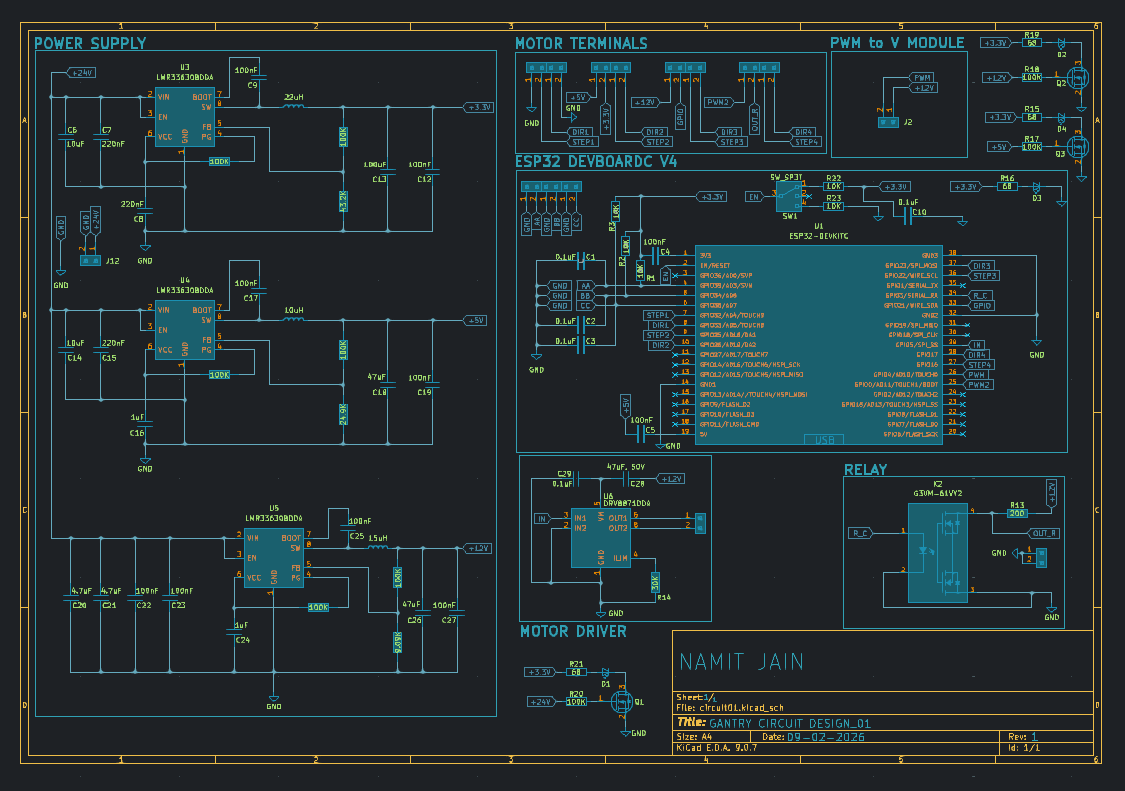
Freelance Electromechanical Engineer
Kelvin6k Technologies & Startups
Jan 2026 – Mar 2026
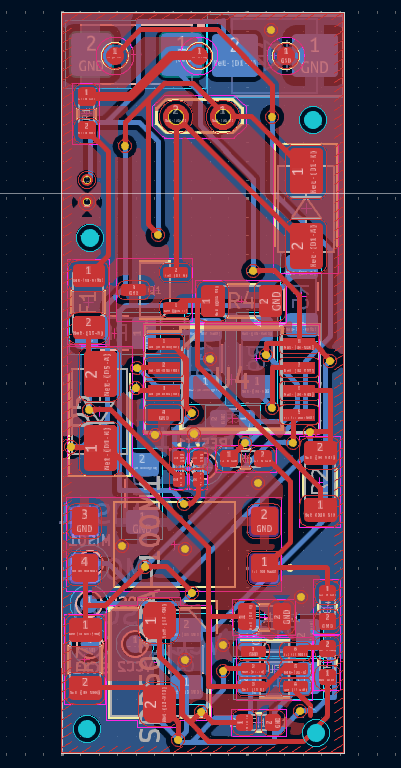
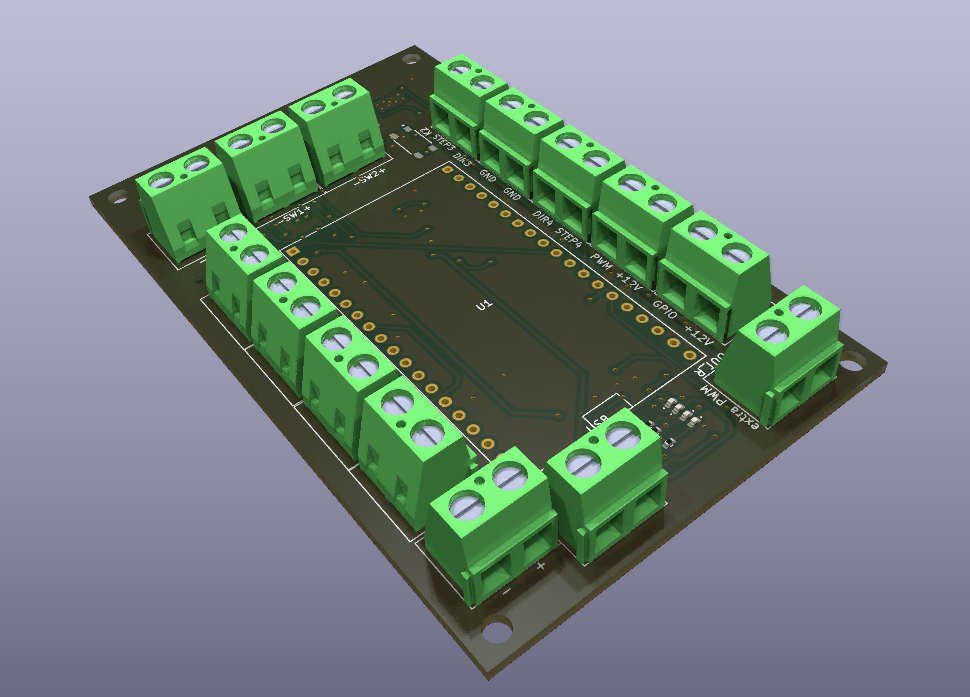
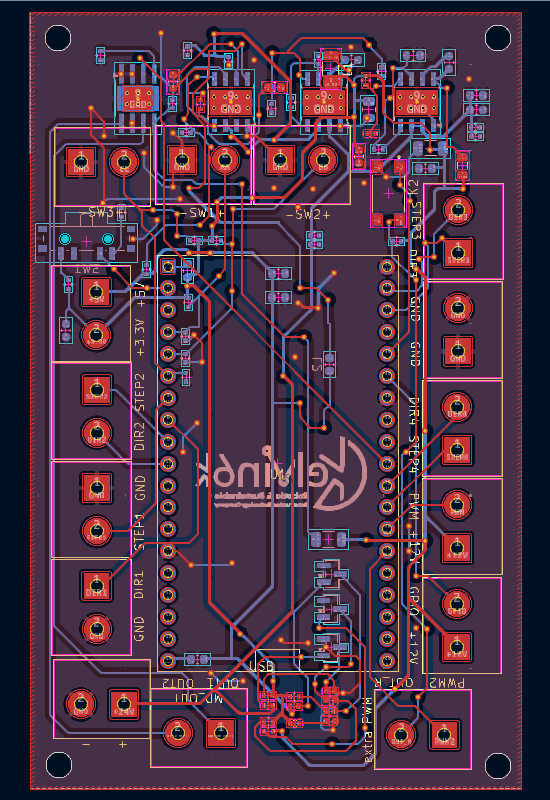
EtherCAT-to-PWM gantry interface board for robotic concrete 3D printer. EMI/EMC and RoHS compliant, cutting setup time and cost by 50%.